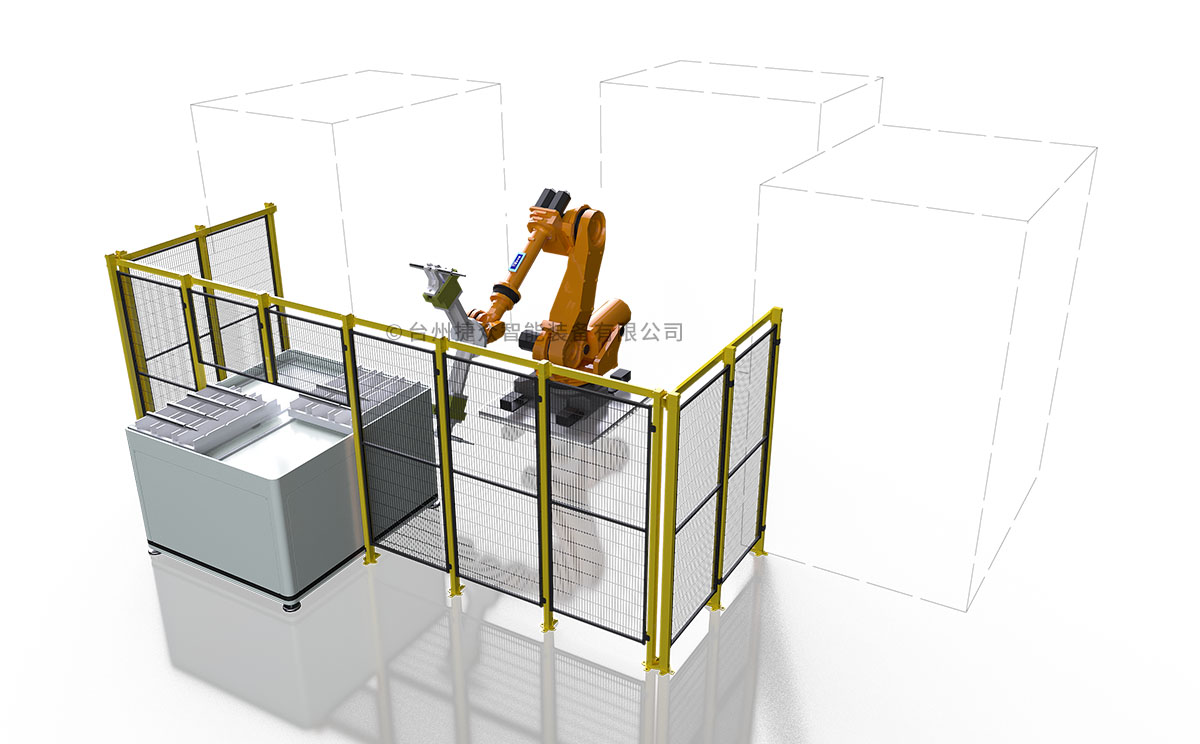
机械手臂,精确地定位到三维或二维上的一点
引言:随着国内企业对于设备的升级改造,已经基本上实现了自动化,而且有不少企业都在使用机械手臂。接下来我们就给大家介绍机械手臂是哪些部件组成的,机械手臂的设计要求是什么。
机械手臂是机械人技术领域中得到最广泛实际应用的自动化机械装置,在工业制造、医学治疗、娱乐服务、军事、半导体制造以及太空探索等领域都能见到它的身影。尽管它们的形态各有不同,但它们都有一个共同的特点,就是能够接受指令,精确地定位到三维(或二维)空间上的某一点进行作业。

机械手臂的组成部分
1、运动元件。如油缸、气缸、齿条、凸轮等是驱动手臂运动的部件。
2、导向装置。是保证手臂的正确方向及承受由于工件的重量所产生的弯曲和扭转的力矩。
3、手臂。起着连接和承受外力的作用。手臂上的零部件,如油缸、导向杆、控制件等都安装在手臂上。
此外,根据机械手运动和工作的要求,如管路、冷却装置、行程定位装置和自动检测装置等,一般也都装在手臂上。所以手臂的结构、工作范围、承载能力和动作精度都直接影响机械手的工作性能。

机械手臂的设计要求
1、手臂应承载能力大、刚性好、自重轻。手臂的刚性直接影响到手臂抓取工件时动作的平稳性、运动的速度和定位精度。如刚性差则会引起手臂在垂直平面内的弯曲变形和水平面内侧向扭转变形,手臂就要产生振动,或动作时工件卡死无法工作。
2、手臂的运动速度要适当,惯性要小。机械手的运动速度一般是根据产品的生产节拍要求来决定的,但不宜盲目追求高速度。手臂由静止状态达到正常的运动速度为启动,由常速减到停止不动为制动,速度的变化过程为速度特性曲线。手臂自重轻,其启动和停止的平稳性就好。
3、手臂动作要灵活,手臂的结构要紧凑小巧,才能做手臂运动轻快、灵活。在运动臂上加装滚动轴承或采用滚珠导轨也能使手臂运动轻快、平稳。
4、位置精度高,机械手要获得较高的位置精度,除采用先进的控制方法外,在结构上还注意很多问题。
5、通用性强,能适应多种作业;工艺性好,便于维修调整。
通过上面的介绍,相信大家已经明白了机械手臂是哪些部件组成的。在机械手臂的设计中,必须要符合上述的要求。
参阅:《机械手臂设计要求》