机械手论文,以设计一台工业机器人机械手为例
引言:本文主要对机械手论文中的摘要、目录、概述、机械手的相关知识,以及机械手相关的设计案例等,进行描述与介绍。
如今,论文常用来指进行各个学术领域的研究和描述学术研究成果的文章,简称之为论文。它既是探讨问题进行学术研究的一种手段,又是描述学术研究成果进行学术交流的一种工具。它包括学年论文、毕业论文、学位论文、科技论文、成果论文等。
那么,机械手论文属于哪类论文呢?其实,对于在校学习机械手相关专业的同学来说,它可以是学年论文,也可以是毕业论文,甚至可以是学位论文。而对于,我们这些自动化公司、科技公司来说,它可以是科技论文或是成果论文,一项研究成果或是一项专利成果,所要发表的论文。接下来,我们来继续讨论机械手论文。
机械手论文的摘要
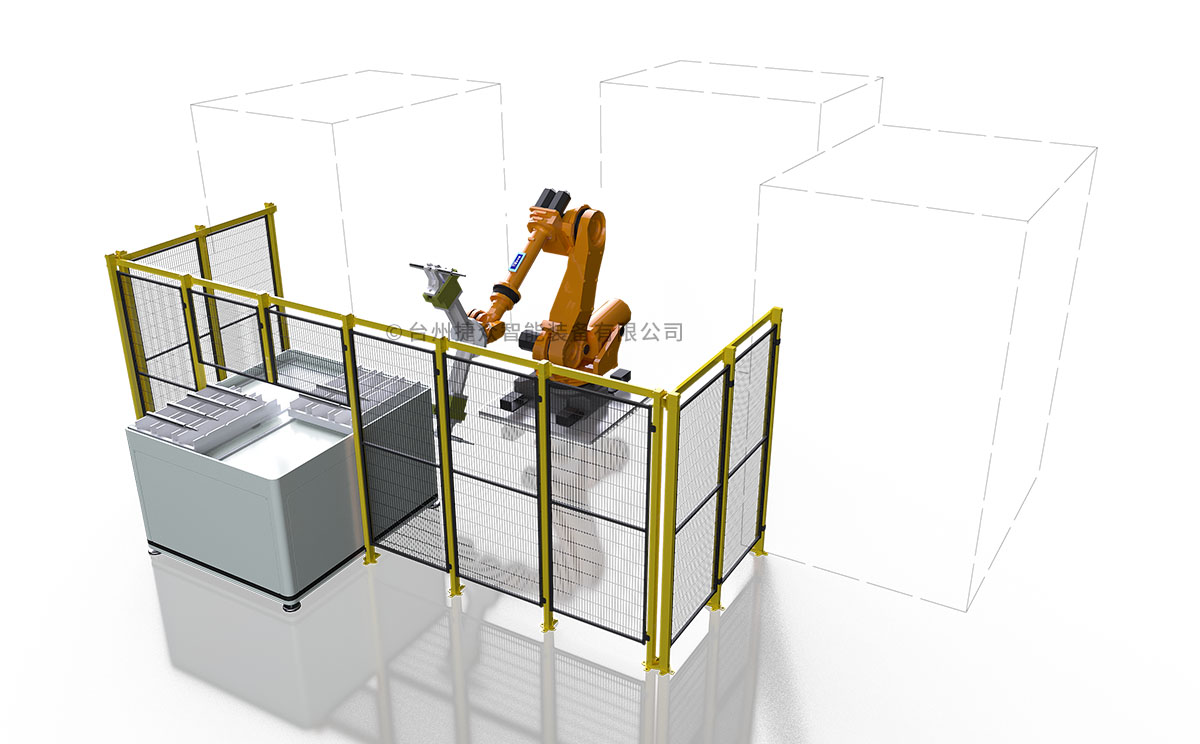
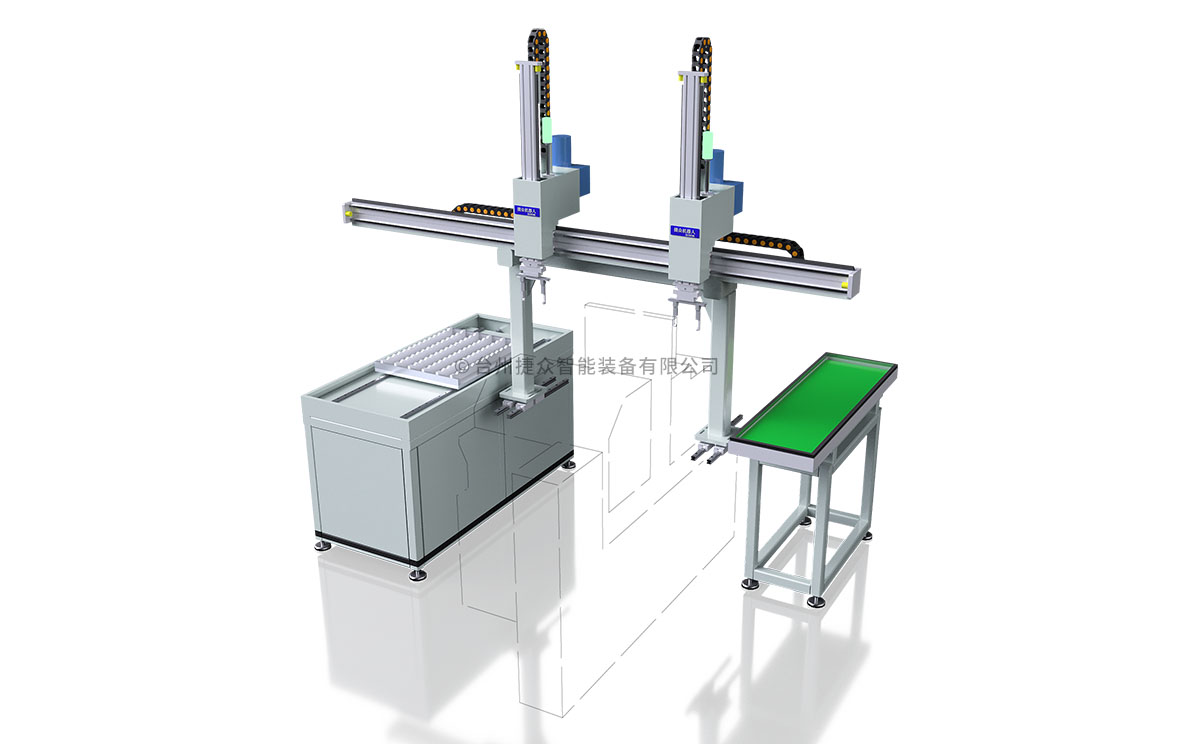
机械手论文的摘要部分我们可以这样写。例如:本文将设计一台四自由度的工业机器人机械手,用于给数控机床设备的上下料。首先,本文将设计机械手的底座、横臂、纵臂和机械手的结构,然后选择合适的传动方式、驱动方式,搭建机械手的结构平台。
在此基础上,本文将设计该机械手的控制系统,包括数据采集卡和伺服放大器的选择、反馈方式和反馈元件的选择、端子板电路的设计以及控制软件的设计,重点加强控制软件的可靠性和机械手运动过程中的安全性,最终实现的目标包括:关节的伺服控制和制动问题、实时监测机械手的各个轴向的运动情况、机械手的示教编程和在线修改程序、设置参考点和回参考点。
这样,有了摘要的介绍,我们就能清楚的知道我们这篇机械手论文的主要内容,整篇论文的大致提纲,以及论文的主角是一台四自由度的工业机器人机械手。
机械手论文的目录
有了摘要的介绍之后,我们就可以开始着手设计目录了。目录是书籍正文前所载的目次,大致样式如图所示。
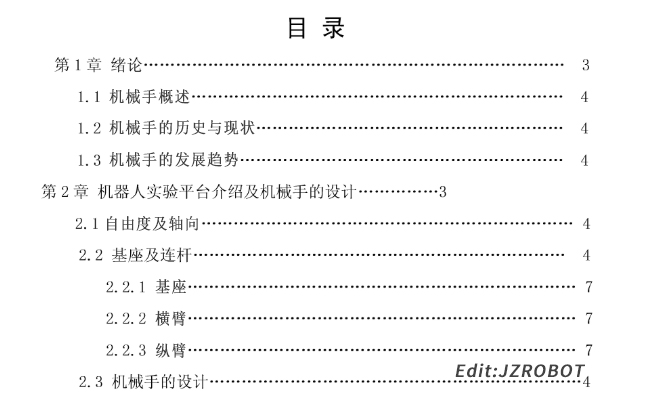
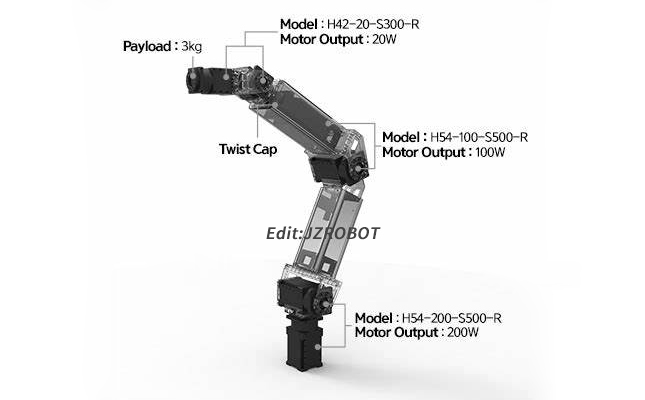
目录如何设计,要根据摘要所表述的内容,比如之前举例的设计一台四自由度的工业机器人机械手,主要的大标题就是机械手的结构和机械手的控制系统,其中机械手的结构包括底座、横臂、纵臂、驱动方式、传动方式、制动器等;控制系统硬件部分则包括工控机、数据采集卡、伺服放大器、端子板、电位器机器标定、电源等;控制系统软件部分则包括实时显示各个关节角与运动范围控制、直流电机的伺服控制、电机的自锁、示教编程及在线修改程序、设置参考点及回参考点。
最后,就是总结的部分。每一篇论文都需要有一个总结的部分,总结是整篇文论的归总与结论,要是没有结论,那这篇论文就不算完成,在某种意义上来讲就是还没有写完,需要继续写下去。
总结可以分为这几个部分来写,比如机械手在设计过程中所要完成的工作包括哪些,以本文的四自由度工业机器人机械手来说,对实验平台的改造、对关节轴电位器进行重新标定、设计端子板电路及驱动电路、控制软件的设计都是所完成的工作。还有,设计经验总结,误差分析,可以继续探索的方向等,都可以进行适当讨论和总结。
写完之后别忘了致谢部分,以及参考文献的部分。参考文献的基本格式如下:
[1] 周伯英. 工业机器人设计. 北京:机械工业出版社,1995
[2] 陈国联 王建华 夏建生. 电子技术. 西安交通大学出版社,2002
这样,我们这篇机械手论文就算基本完成了。从机械手论文的摘要开始,到机械手论文的目录,以及机械手相关知识与设计案例,虽然没有介绍的很详细,但是基本框架已经有了,可以通过文中提到的一些知识,进行深入的探讨和研究。如果在机械手论文上还有不清楚的地方,可以关注我们的公众号和企业网站,上面有更多关于机械手的知识。