关于机器人的资料,了解更多机器人技术
引言:本文主要介绍关于机器人的资料,包括机器人的控制方法,以及机器人在不同操作环境下的分类。机器人技术日益壮大的今天,我们应该更多地去了解关于机器人的资料。
机器人技术,设计,构造以及使用机器(机器人)来执行人类传统上完成的任务。机器人广泛用于汽车制造等行业中,以执行简单的重复性任务,以及必须在对人体有害的环境中进行工作的行业。
机器人技术的许多方面都涉及人工智能;机器人可能具备与人类相同的感觉,例如视觉,触觉和感测温度的能力。有些甚至可以进行简单的决策,并且当前的机器人技术研究旨在设计具有一定程度自给自足的机器人,这将允许在非结构化环境中进行移动和决策。
按操作环境对机器人进行分类
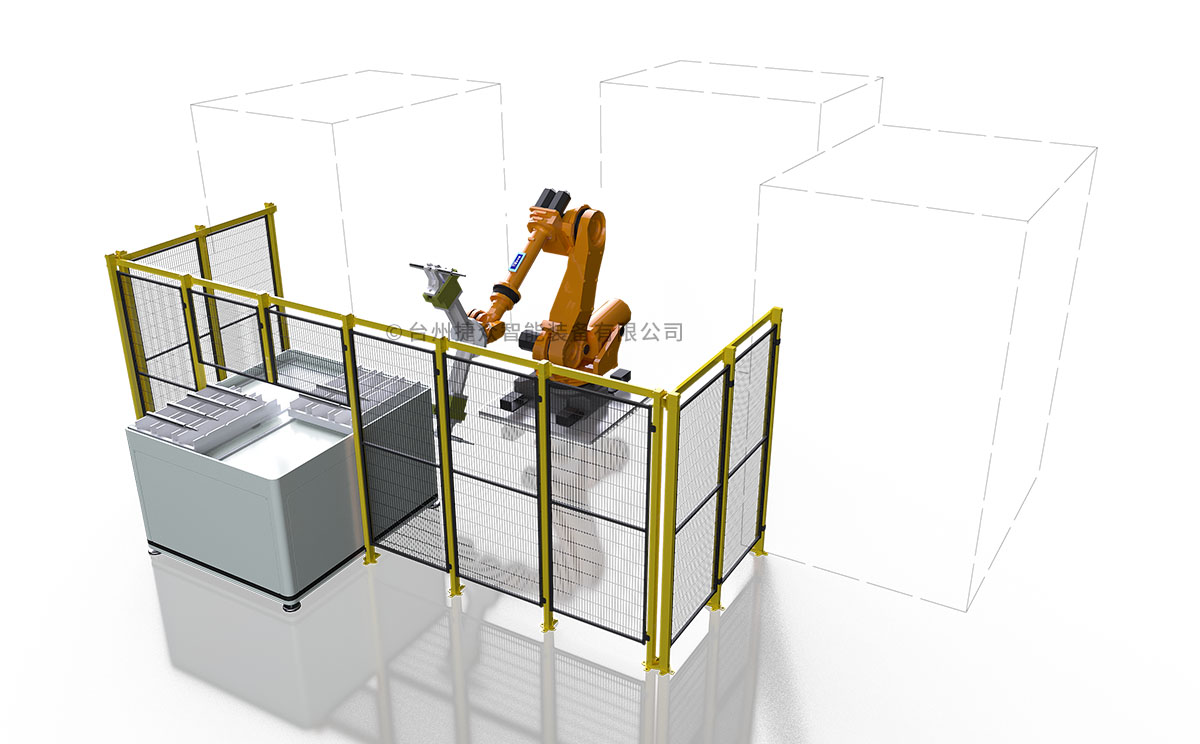
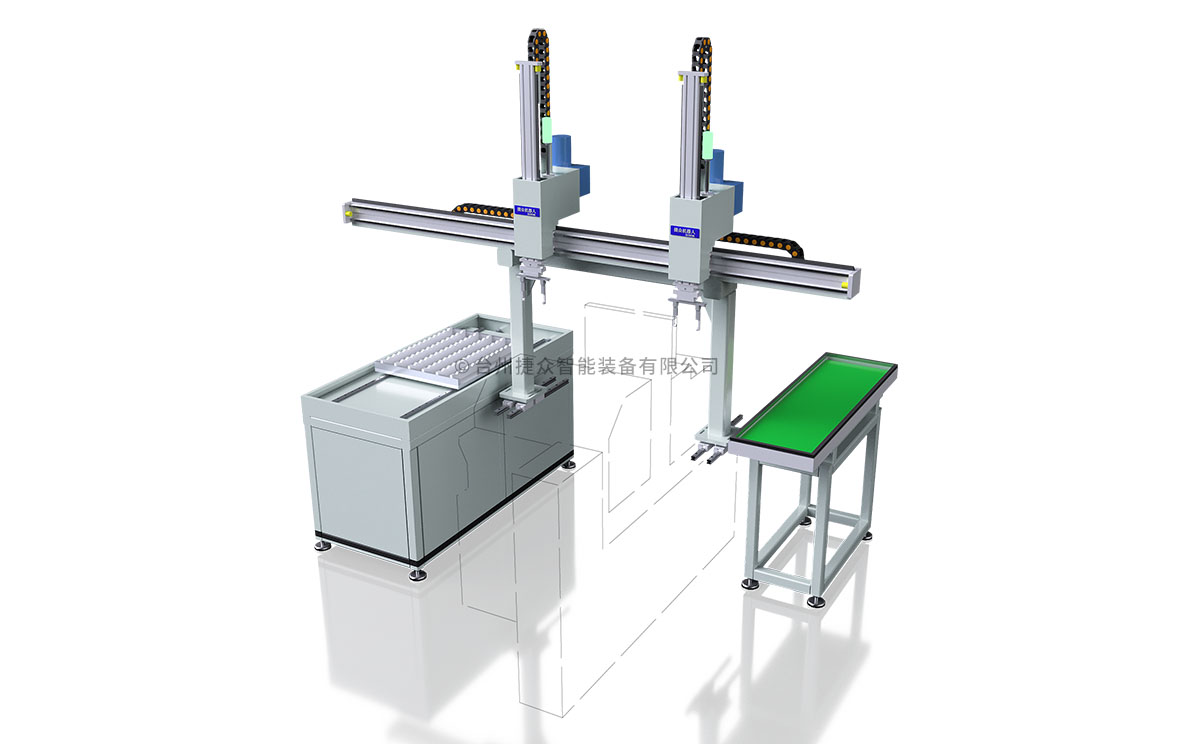
1、固定式机器人:可以将机器人手臂,计算机化的机床以及固定在一个地方的大多数其他工业机器人归为此类。工业机器人常用的配置是:关节式机器人手臂,圆柱坐标机器人手臂,SCARA机器人手臂和直角坐标机器人手臂。
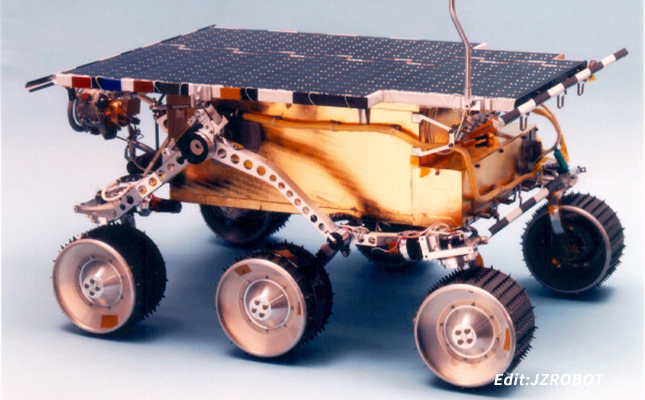
2、地面机器人:从字面意思就可以得出结论,这些机器人在地球或其他行星的地面上运行。可以通过将它们的传动系作为车轮,轨道或腿来进行分类。
3、空中机器人:这些机器人是无人驾驶飞机,例如机器人飞机和直升机。
4、微重力机器人:这些机器人设计用于在低引力环境中运行,例如地球轨道。
5、水下机器人:旨在在水下和较大深度进行操作的机器人。
机器人的控制方法
1、遥控操作
在这种控制方法中,操作员要从远方控制机器人,以使操作员无法看到机器人在做什么(无线电遥控玩具车不算作遥控操作系统。)操作员和机器人具有某种类型的主副机关系。通常,操作员坐在工作站上,并通过某种界面指导机器人。美国宇航局(NASA)的火星探险家机器人Sojourner是遥控机器人的一个例子。
2、远程呈现
远程呈现的目标是通常称为虚拟现实的虚拟现实,在这种虚拟现实中,操作员具有完整的传感器反馈,并且感觉就像是机器人一样。如果操作员转向某个方向看,则可以看到机器人的视线。如果操作员按下操纵杆使机器人向前移动且车轮打滑,则操作员会听到并感觉到电动机在变形,同时看不到视觉变化。这为人类提供了更自然的界面,但是在设备方面非常昂贵,并且需要很高的带宽速率。每个机器人仍然需要一个人。这比传统的远程操作要好,但是距离让一个远程操作员控制多个机器人还有很长的路要走。
3、自主控制
由计算机控制,具有传感器反馈,无需人工干预。智能机器人控制需要计算机控制。在这种类型的控制中,计算机可以根据传感器反馈向机器人发送预编程的位置,甚至在机器人移动时控制机器人的速度和方向。计算机还可以与其他设备通信,以帮助指导机器人完成其任务。
关于机器人的资料,机器人在不同的操作环境下,大致可以分为固定式机器人、地面机器人、空中机器人、微重力机器人、水下机器人等;至于机器人的控制方法,则有遥控操作、远程呈现、自主控制等。更多关于机器人的资料,可以关注我们来了解哦。