自动取料机械手设计的要求及方案确定
引言:关于机械手设计的具体工作,是不可能有一整套固定不变的设计步骤和工作内容的,必须根据具体情况作具体的分析。现将本次自动取料机械手设计时的有关工作内容和一般需要考虑的问题分析一下。
我们知道机械手是模仿人手动作,按照指定程序以实现自动抓取、搬运或操作的自动化机械。在工业生产中应用的机械手被称为工业机械手。我们今天讨论的话题是,关于自动取料机械手设计的要求及方案确定。
明确设计要求
1、被抓对象的情况
被抓对象的情况就是被物件的重量、形状、尺寸、材料、表面加工情况、易碎性及数量等,以便选择手部的结构及计算必要的夹紧力或吸附力大小。
2、工作现场的情况
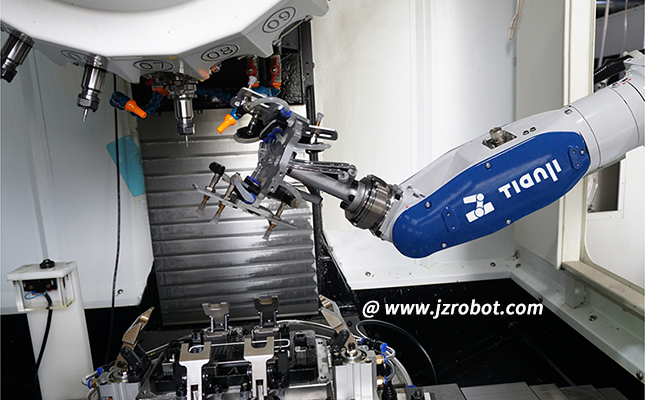
自动取料机械手涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。它是一种能自动控制并可以重新编程以变动的多功能机器。它有多个自由度,可以搬运物体以完成在不同环境中的工作。新型自动取料机械手不仅提高了分装计量精度和工作效率,而且改善了工人的劳动条件,避免了可能存在的安全隐患,提高工作安全性。
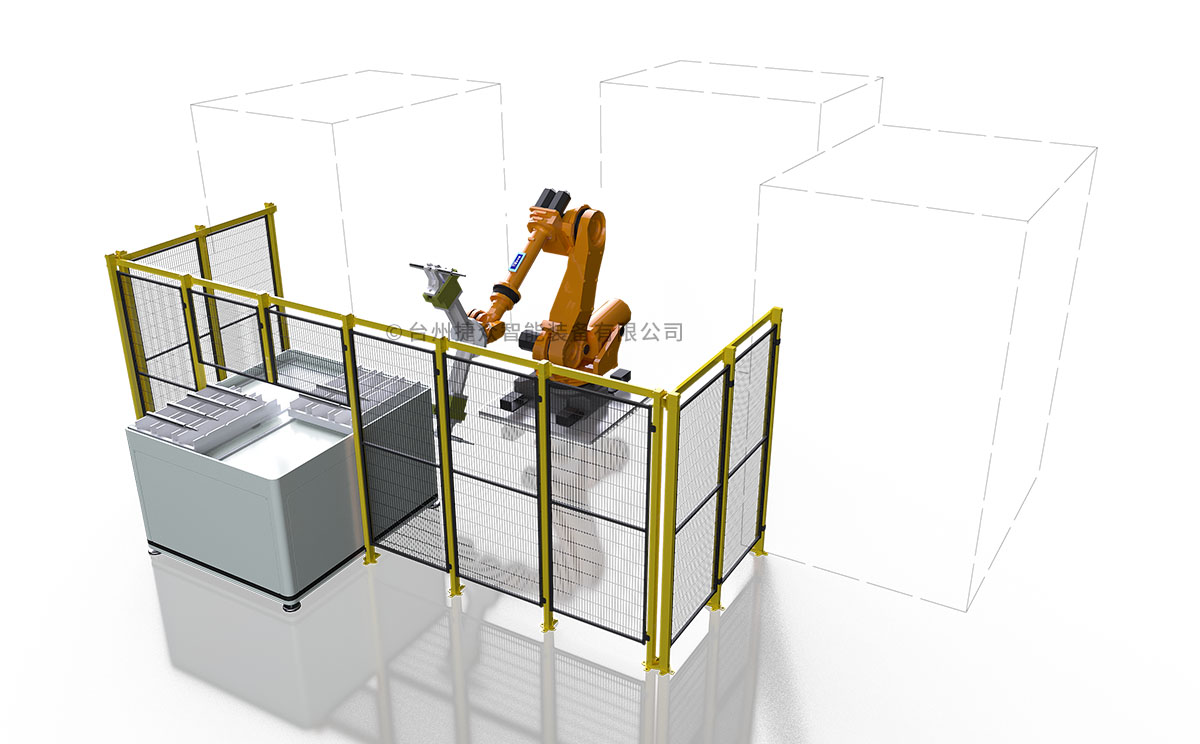
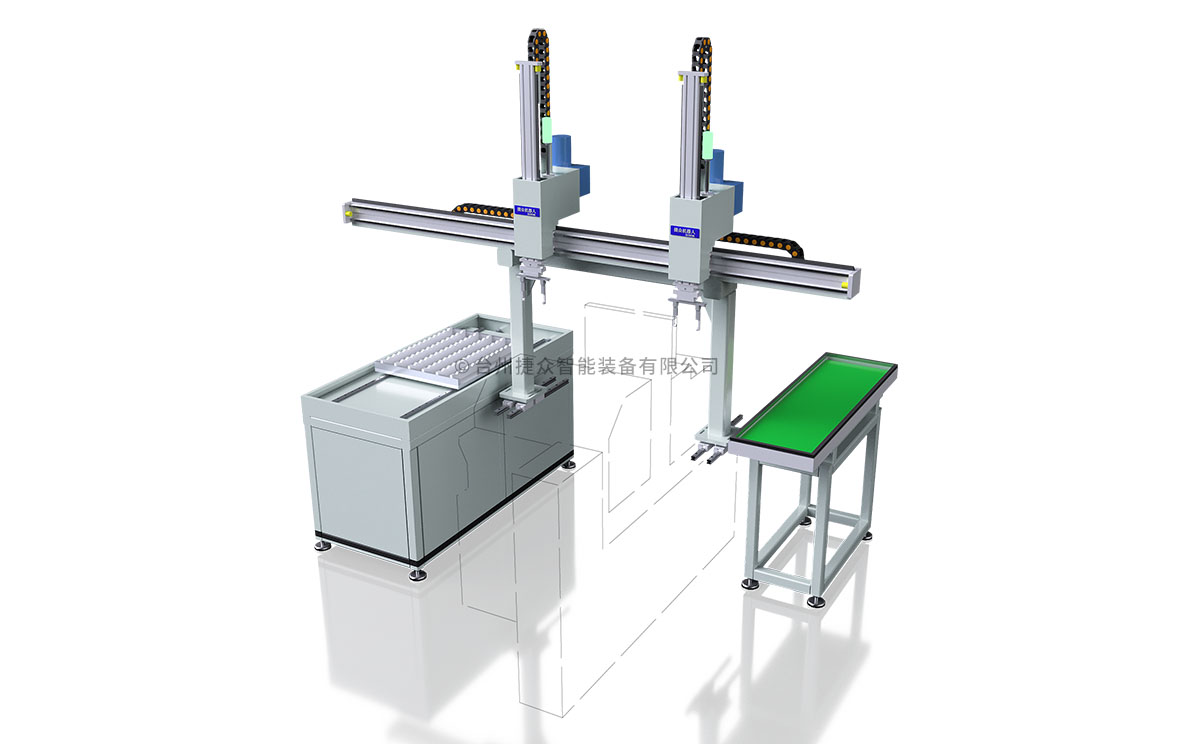
3、上、下料道和储料装置及工作主机的配置情况
上、下料道和储料装置与工作主机的相对位置,决定了工件在上料前和下料后在空间所处的位置和姿势,这直接影响手臂的坐标形式。
4、生产工艺和工作机械对机械手的要求
由于产品生产工艺过程的不同和工作机械的不同生产特点,影响机械手的自由度、运动轨迹、运动速度和定位精度的确定,因此必须对生产工艺进行分析,比较工艺的先进性和稳定性,最后按先进的工艺,设计必要的机械手,以完成辅助工作。
5、工作环境及其它特殊要求
如在高温环境工作的机械手,由于有热的传导和辐射问题,手部要采取冷却与隔热措施;如在粉尘的环境下工作的机械手,应加防护罩及密封装置;如在有腐蚀性的环境工作的机械手,应选择耐酸或耐碱的材料或涂敷耐酸、碱的橡胶。
传动方案确定
确定传动方案是设计机械手首先要进行的工作。随着传动方案的确定,机械手的总体布局也就有了概貌。
确定传动方案的主要内容有两个:一是确定机械手的驱动方式。究竟是用液压、气压、电动,还是机械传动,这要根据生产工艺过程、生产节拍和工作环境,综合工厂具体条件确定,本次设计采用气压传动驱动方式。二是确定运动路线(即运动轨迹)。专用机械手要实现设计所需的动作要求,例如把工件从一个位置传动到另一个位置,往往可有好几个运动路线,需要通过分析比较最后确定一个路线最短、动作最少的方案。考虑运动路线时,一般可参照人的手臂和手腕的动作进行模拟类比,较直观的拟定方案,同时参照手臂坐标形式来进行方案比较。
总之,在确定运动路线时,主要根据动作要求,并结合其它设计要求进行全面分析比较,使手臂、手腕、手指分工配合协同动作,达到运动路线既短,结构又简单、紧凑、合理、可靠。
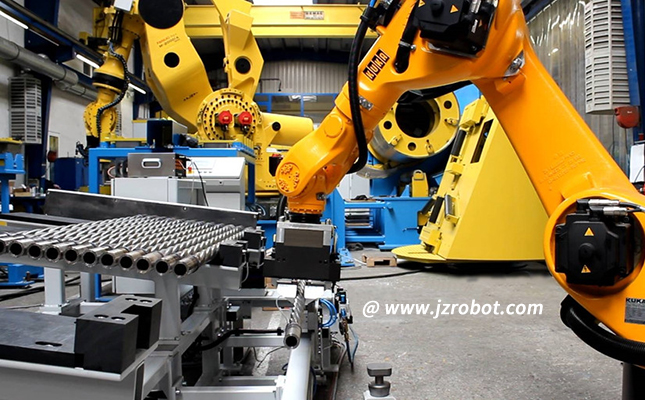
自动取料机械手的应用正在不断地提升,例如汽车的喷漆、钣金,重型货物的吊装与取放等,越来越多的行业正在步入自动化。这也是我们设计自动取料机械手的目的,希望这篇文章能够帮助对机械手设计感兴趣的朋友,更加了解自动取料机械手,并能创新出更多有助于各行各业的相似自动化设备。