机械手设计过程中有哪些关键要素
引言:机械手臂正在各大生产加工企业中发挥越来越大的作用,这些机械手臂能够连续工作,大大提高了工作效率并节约了企业的人力成本。今天,我们主要为您介绍一下机械手设计过程中有哪些关键要素。
机械手按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。
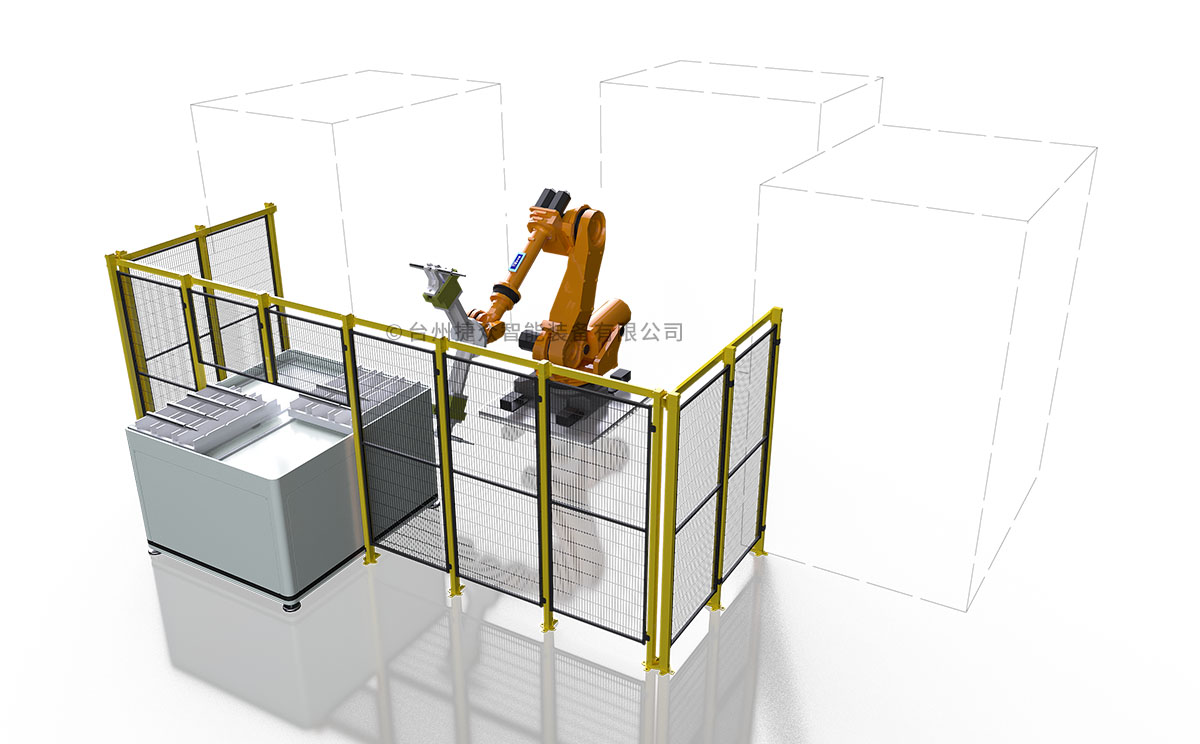
多关节机械手的优点:动作灵活、运动惯性小、通用性强、能抓取靠近机座的工件,并能绕过机体和工作机械之间的障碍物进行工作。随着生产的需要,对多关节手臂的灵活性,定位精度及作业空间等提出越来越高的要求。
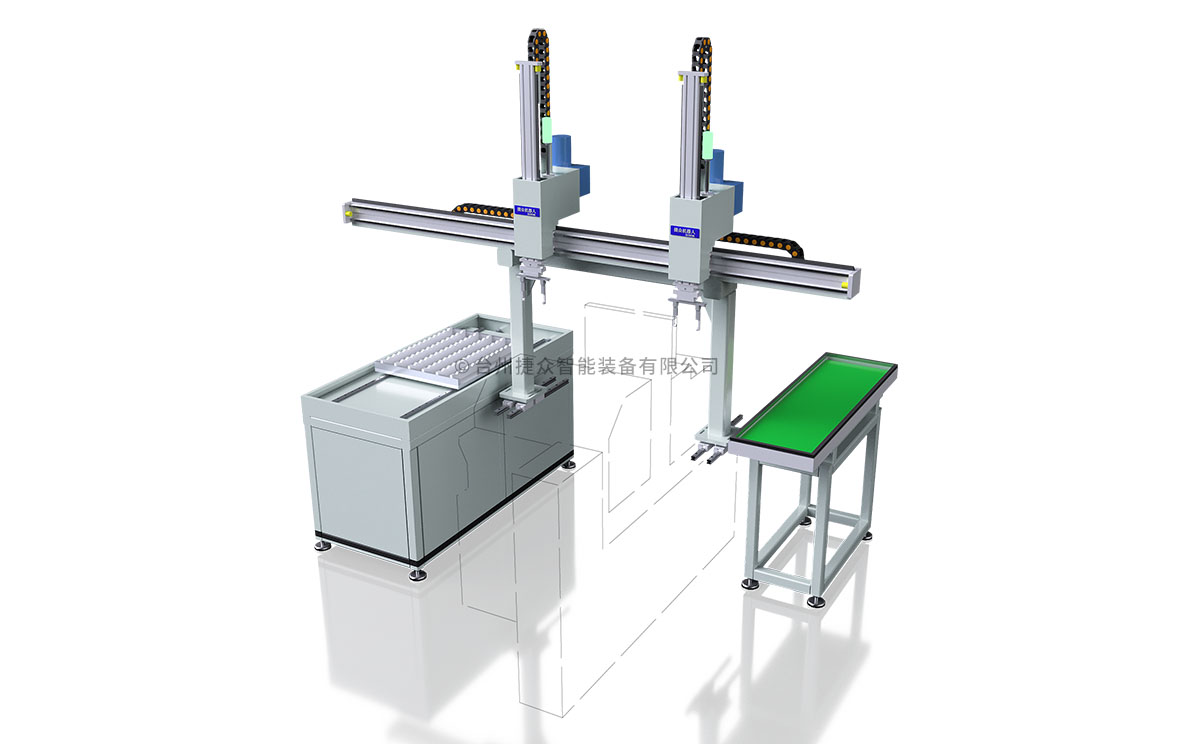
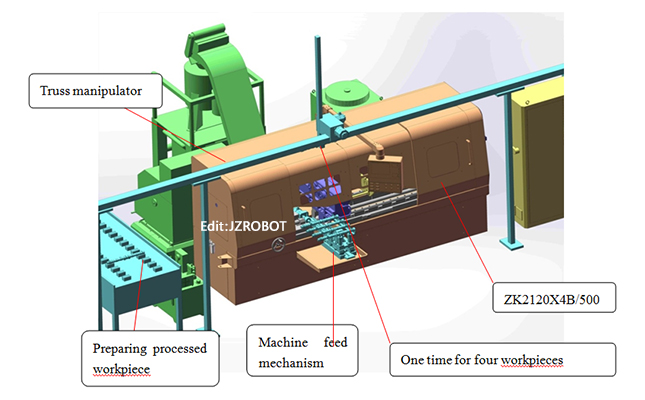
桁架式机械手的优点:动作简单、运动效率高,对于大批量生产的工件,时效要明显优于多关节机械手。多关节机械手与桁架式机械手各自有各自的需求市场,同样在机械手设计方面,也各有不同。

想要设计一个机械手,你需要先了解以下几点:
第一:确定驱动器数量以及传动方式
一般机械手都是电机驱动,可以是一个电机也可以是多个,一个电机的机械手只能控制5个手指的张开和闭合,因为是欠驱动的缘故,能够较好地自适应物体的外形。
传动方式有很多,现在比较流行的是Tendon驱动,也有不少是连杆,齿轮之类的。
第二:驱动器选型
据我们的工程师介绍,就拿电机驱动为例,机械手有一个很重要的指标就是每个Phalanges的Contact Force,你需要根据你需要的接触力大小去反推电机的输出力矩,确定电机型号。在计算接触力的时候,你根据手指的几何参数去确定传递矩阵和雅克比矩阵,欠驱动这块计算比较复杂。
第三:传感器选型
你需要很好地控制这个机械手,你当然要知道手指的反馈信息。我们组里的机械手采用的是2类传感器,一类是装在指尖指腹的Touch Senor,一类是装在电机输出端的Absolute Angle Sensor 。
第四:柔性关节设计
就像人手一样,掰一掰手指还是挺有韧性的,设计机械手也一样,不可能稍微碰撞一下手指就断掉了。柔性这块也是需要花心思去设计的。
以上四点就是机械手设计时要注意的要素,机械手臂正逐渐取代人力在生产中的作用,在企业自动化进程中发挥着重要的作用。