桁架机械手原理,桁架机械手发展趋势
发布时间:2018-04-13 13:54:54 浏览:次
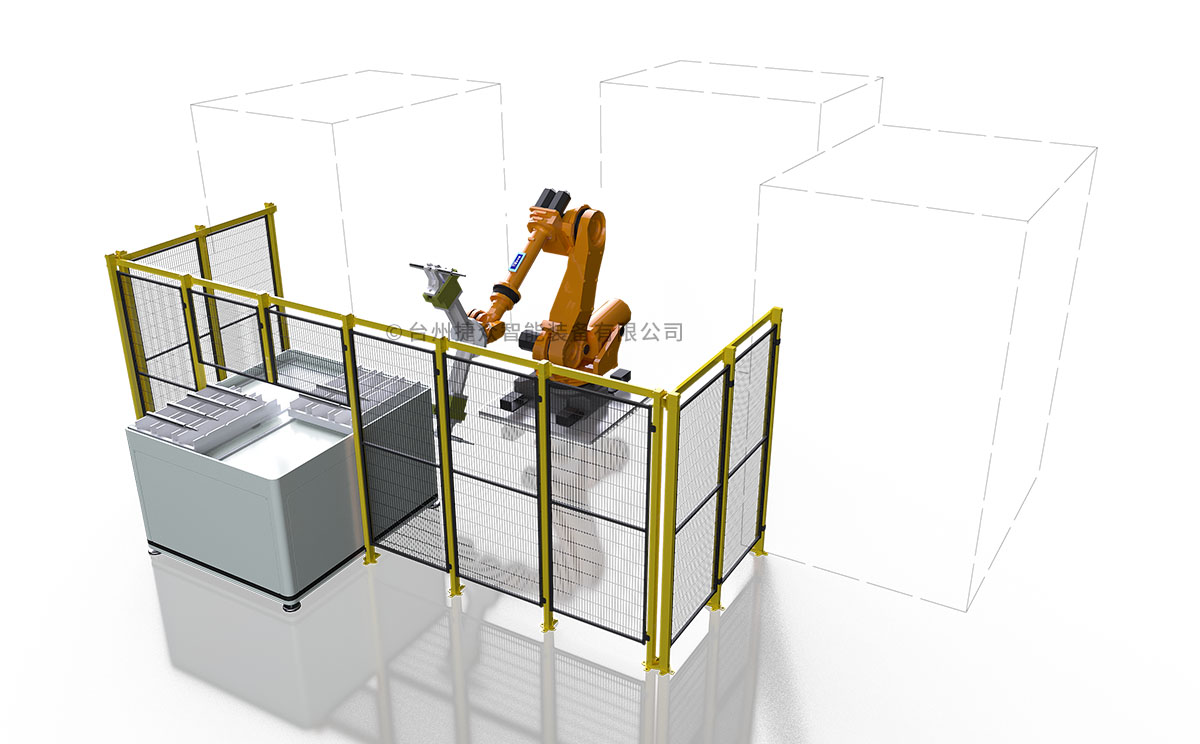
引言:桁架机械手是一种建立在直角X,Y,Z三坐标系统基础上,对工件进行工位调整,或实现工件的轨迹运动等功能的全自动工业设备。其控制核心通过工业控制器(如:PLC,运动控制,单片机等)实现。通过控制器对各种输入(各种传感器,按钮等)信号的分析处理,做出一定的逻辑判断后,对各个输出元件(继电器,电机驱动器,指示灯等)下达执行命令,完成X,Y,Z三轴之间的联合运动,以此实现一整套的全自动作业流程。
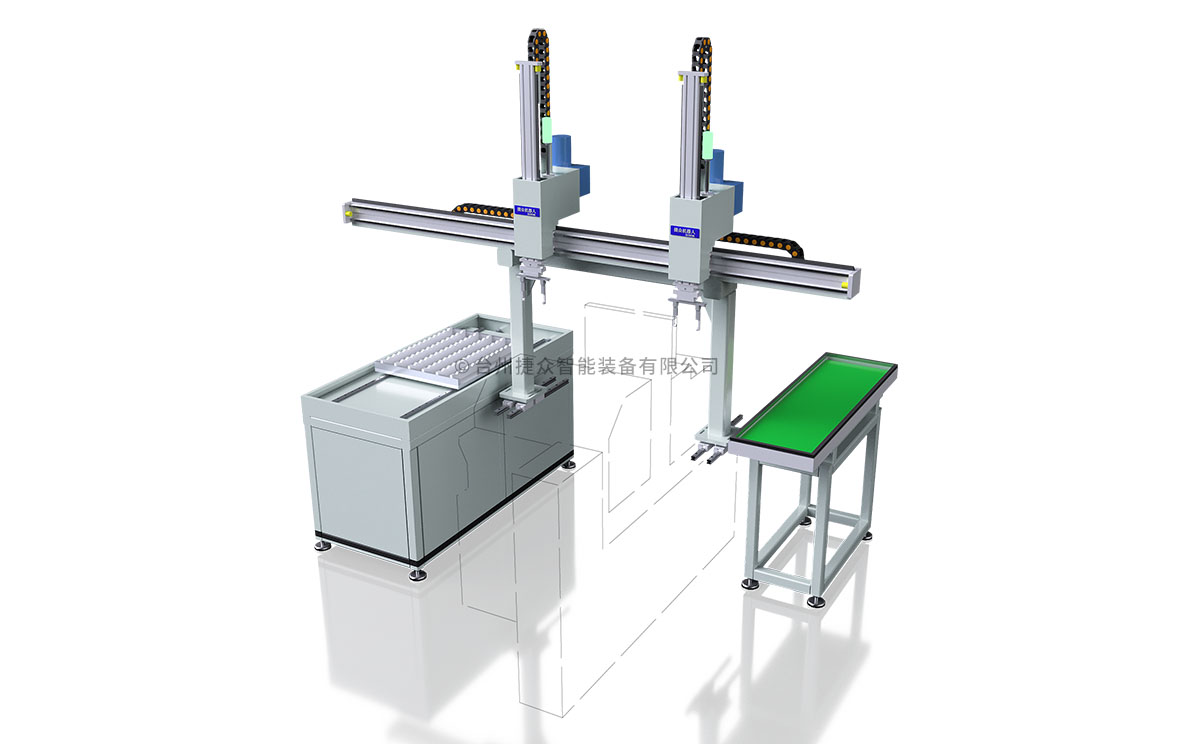
现在的桁架机械手比传统的机械臂在现场检查和修复方面具有许多潜在的优势。这种新的机器人就是基于X,Y,Z三轴的桁架机械手,结合机械手的灵巧能力及桁架结构特性的概念。通过用直线模组代替桁架中的某些固定长度构件,可以改变结构的整体形状。通过协调这些模组中的滑块的运动,能使桁架机械手执行与产品上下料的相关工作,包括搬运、上下料、夹物、持具等等。
在对桁架机械手的进一步研究中我们发现,可以通过对其进行多自由度的设计,再配合机器视觉的作用,就能对现场物件进行检测、识别、搬运,甚至过障碍等一些普通机械手根本不可能完成的任务和动作。这种新型的多自由度机器人或许在不久的将来就能得到广泛应用,因为此类智能化的机器人在国外已经有案例,并且实际的得到了应用,国内工业的不断发展,也将会把工业带入智能化时代。